UNIDAD 2 MODELADO DE SISTEMAS DINÁMICOS
Este tema está dedicado al
modelado de sistemas dinámicos. Esto es, a la obtención de un conjunto de
ecuaciones matemáticas que describen el comportamiento de un sistema físico. No
se estudia el modelado de todos los posibles sistemas físicos; tampoco el
modelado pretende ser exhaustivo. La exposición se centra principalmente en el
modelado de sistemas lineales, aunque en algún caso se considerarán modelos no
lineales.
El modelado de un sistema
dinámico consta de tres fases:
·
A
partir de la utilidad que vaya a tener el modelo decídase qué señales son las
de entrada o excitación, las de respuesta o salida, qué variables son internas,
y cuáles son los parámetros (constantes) a tener en cuenta. Pueden dibujarse
inicialmente bloques (sin ecuaciones
matemáticas) que describen
la interacción de
las variables.
·
Escribir
las relaciones matemáticas que relacionan las variables de entrada y salida de
cada elemento del conjunto.
·
Añadir
las ecuaciones que ligan unos elementos con otros. Obtener un modelo
en espacio de
estado o mediante
funciones de transferencia del
conjunto.
Este proceso se sigue muchas
veces de forma inconsciente. Aquellos que están acostumbrados a trabajar, por
ejemplo, con circuitos eléctricos pueden escribir directamente las ecuaciones
del modelo. En las secciones siguientes se presentan modelos de diversos
sistemas físicos. La exposición no abarca todos los modelos dinámicos; no se
incluyen, por ejemplo, modelos de población o modelos económicos. Las
ecuaciones que resultan del modelado de distintos sistemas tienen, a menudo, la
misma forma, lo que hace posible el establecimiento de analogías. En este
texto, sin embargo, no se hará un tratamiento amplio de analogías.
2.1 FUNCIÓN DE TRANSFERENCIA
Una vez que se han
definido los diferentes tipos de sistemas, es necesario conocer la dinámica de
los mismos a partir de ecuaciones que relacionen el comportamiento de una
variable respecto a otra. Para lograr lo anterior se requiere de gran
conocimiento de los procesos y de los elementos que los conforman, y de cada
una de las disciplinas de la ingeniería involucradas. Es por ello que la
ingeniería de control se considera un campo interdisciplinario.
Una planta o cada una
de las partes que forman un sistema de control, puede ser representada por un
conjunto de ecuaciones integro-diferenciales de n-ésimo orden con coeficientes
lineales invariantes en el tiempo que relacionan la variable de entrada con la
variable de salida de la forma:

























































Dónde: a1y b1 son
constantes, u(t) es la entrada y y(t) es la salida.
Usando la
transformada de Laplace para convertir la ecuación integro diferencial (1.1) en
una ecuación algebraica considerando que las condiciones iniciales son iguales
a cero llegamos a la siguiente expresión:

Relacionando la
salida Y(s) con la entrada X(s) tenemos:

Esta última expresión
es denominada la función de transferencia de sistema.
La función de
transferencia de un sistema lineal con coeficientes constantes invariantes en
el tiempo esta definida como: "La relación de la transformada de
Laplace de la salida
con la transformada de Laplace de la entrada, suponiendo condiciones iniciales
cero". El hecho de trabajar con funciones de transferencia, simplifica en
gran medida el manejo matemático de los sistemas dado que las ecuaciones diferenciales
se transforman en ecuaciones algebraicas lineales, y las operaciones en el
dominio de la frecuencia compleja s son multiplicaciones simples. Con ello la
salida del bloque de la figura 1.6 es Y(s) = H(s)X(s).
Una metodología a
seguir para la determinación de la función de transferencia de un sistema es la
siguiente:

1)
Identificar
las ecuaciones de equilibrio o leyes físicas involucradas en el sistema.
2)
Siguiendo
las ecuaciones de equilibrio plantear las ecuaciones integro diferenciales
correspondientes a cada variable de interés.
3)
Obtener
la transformada de Laplace de cada ecuación considerando condiciones iniciales
cero.
4)
Relacionar
la variable de salida con las variables de entrada.
Dada la naturaleza
multidisciplinaria de un sistema de control este puede estar
Conformada por
subsistemas interconectados, donde cada uno de ellos contiene elementos cuyo
comportamiento es estudiado por diferentes ramas de la ingeniería.
Es por esta razón que
a continuación se estudiarán los elementos así como las leyes de equilibrio de
los sistemas más comunes como son:
- Sistemas mecánicos.
- Sistemas
eléctricos.
- Sistemas de nivel
de líquidos.
- Sistemas térmicos.
Los movimientos de
los sistemas mecánicos se pueden describir como de traslación o de rotación o
de una combinación de ambos. Las ecuaciones que gobiernan los sistemas
mecánicos están formuladas por la ley de movimiento de Newton.
Son los movimientos que se
caracterizan por el desplazamiento de un cuerpo a lo largo de una línea recta.
La ley de Newton sobre cuerpos rígidos dice que la suma algebraica de fuerzas
es igual a la masa del cuerpo por el vector de aceleración:


En la relación causa-efecto
del desplazamiento, los cuerpos sometidos a un conjunto de fuerzas, pueden ser
modelados a través de tres elementos base: masa, resorte o muelle y rozamiento
o fricción. La masa es la propiedad de un elemento de almacenar energía
cinética del movimiento de traslación:

Muelle es un elemento
que almacena energía potencial al ser sometido por una fuerza externa:
Siendo k la constante
del muelle. En cuanto a la fricción o rozamiento, modelan la conversión de la
potencia mecánica en flujo calorífico, fenómeno que aparece cuando se deslizan
dos superficies que están en contacto. Su expresión matemática es no lineal.
Existen tres tipos de modelos: fricción viscosa, fricción estática y fricción
de Coulomb. La primera es lineal y las otras dos siguientes no son lineales. En
este curso, sólo se empleará el rozamiento viscoso para simplificar la función
de transferencia de estos sistemas.
La fricción viscosa
representa la relación lineal entre la fuerza aplicada a un cuerpo con la
velocidad de desplazamiento entre este cuerpo y otro que está en contacto con
él. Se modela como un pistón que se mueve dentro de un cilindro. El pistón se
desplaza dentro del cilindro a través de una película de aceite. El aceite
resiste cualquier movimiento relativo entre el pistón y la concavidad del
cilindro; este efecto es debido a que el aceite puede fluir alrededor de la
cámara del pistón. En este tipo de rozamiento, la transferencia de energía
mecánica a calorífica es de carácter lineal. La expresión matemática es:

Figura 4.6 a) muelle b)
fricción

Donde B es el
coeficiente de fricción viscosa. Desde el punto de vista del análisis
dimensional, las unidades en el sistema internacional de los elementos de
modelado de los movimientos de traslación están relacionadas con las
expresiones (4.4), (4. 5) y (4. 6):

Ejemplo 4.1
Obtener la relación
causa efecto entre la fuerza aplicada a un carro sujeto a la pared a través de
un muelle y el desplazamiento que se produce en éste. La masa del carro es M,
el coeficiente del resorte es K y el rozamiento entre las ruedas y la
superficie se modela con el coeficiente de rozamiento B. Considere condiciones
iniciales nulas.
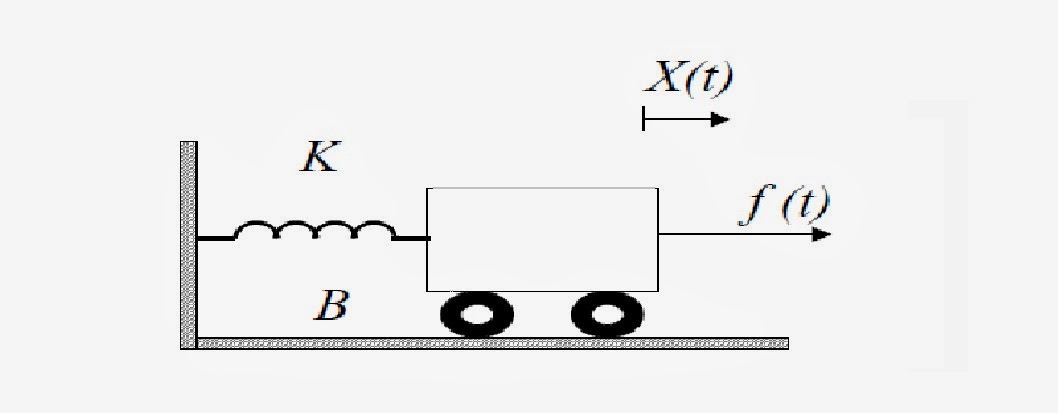
La ecuación
diferencial que explica el desplazamiento del carro según el eje X, en la misma
dirección que la fuerza, es:

Aplicando transformadas de
Laplace resulta la FDT pedida:

Los movimientos de
rotación se definen como extensión de la ley de Newton: La suma algebraica de
momentos o pares alrededor de un eje fijo es igual al producto de la inercia
por la aceleración angular alrededor de un eje. Los elementos bases
constitutivos son: el momento de inercia, el resorte tensional y la fricción
viscosa.
Inercia, J, se
considera a la propiedad de un elemento de almacenar energía cinética del
movimiento de rotación:

Donde r es el radio
del cilindro de masa M y a, w y q son la
aceleración, velocidad y desplazamiento angular respectivamente del cilindro.
Resorte tensional, k,
es el elemento que almacena energía potencial por desplazamiento de unidad
angular:

Fricción viscosa, B,
modela el rozamiento provocado por la velocidad angular entre el cilindro y la
superficie de contacto:

En análisis
dimensional, las magnitudes físicas de los elementos de modelado de los
movimientos de rotación en el sistema internacional son:

En la analogía con
los sistemas eléctricos, el par mecánico será análogo a la corriente eléctrica
y el desplazamiento angular con el potencial eléctrico. Los pares mecánicos
serán representados como fuentes de corriente y el desplazamiento angular como
nodos del circuito eléctrico.
2.1.2 SISTEMAS ELÉCTRICOS
Como se verá a
continuación, la relación entre los elementos de los sistemas eléctricos
mostrados en la Figura 3.2-1 y los de la red generalizada es directa, lo que
permitirá aplicar posteriormente los teoremas y procedimientos de análisis de
las redes eléctricas a las redes generalizadas.
Los elementos que se
emplearán serán el capacitor (que almacena energía en un campo eléctrico), el
inductor (que almacena energía en un campo magnético), la resistencia (que
disipa energía) y el transformador.
Capacitor eléctrico
puro
Si se arreglan dos
piezas de un material conductor de manera que ellas estén separadas por un
material dieléctrico (un material en el cual se puede establecer un campo eléctrico
sin permitir un flujo significante de carga a través de él), se establece un
campo eléctrico entre los conductores cuando fluye una carga hacia un conductor
saliendo del otro. Este campo eléctrico da como resultado una diferencia de
potencial entre los dos conductores, la cual depende de la cantidad de cargas
localizada entre los conductores.
Los dispositivos
físicos que exhiben este tipo de relación de carga y voltaje se dicen que
tienen capacitancia.
Una capacitancia ideal tiene
una carga proporcional a la diferencia de potencial

Donde C es la capacitancia
del elemento en faradios (F = A s / V). La ecuación elemental para un
capacitor ideal es

Cuando se hace fluir
una carga dentro de un capacitor se transfiere energía (Ee ) al elemento, la cual está dada por:

Un capacitor almacena
energía en su campo electrostático, por lo tanto Ee se llama energía de
campo eléctrico. La energía almacenada en un capacitor ideal es
Inductor eléctrico
puro
Cuando la corriente
fluye a través de una estructura conductora, se establece un campo magnético en
el espacio o material alrededor de la estructura. Si esta corriente cambia como
una función del tiempo, la intensidad del campo magnético variará también con
el tiempo. De acuerdo con la ley de Lenz, este campo cambiante inducirá
diferencias de potencial en la estructura conductora las cuales tenderán a
oponerse al cambio de la corriente- La característica básica por la cual un
elemento eléctrico resiste con una diferencia de potencial al razón de cambio del
flujo de corriente a través de él se llama inductancia. Se definirá la
cantidad de acople de flujo ʎ como:

Un inductor puro o ideal
tiene un acople de flujo proporcional a la corriente

Donde la inductancia
L está medida en henrios (h = V s / A).
La ecuación elemental para
un inductor ideal con L constante es

Un inductor almacena
energía en el campo magnético asociado con la corriente. La energía eléctrica
almacenada en un inductor puro se llama energía del campo magnético Em y
está dada por

Si el inductor es ideal,
entonces



Resistor eléctrico
pura
Todos los materiales
ordinarios exhiben resistencia al flujo de carga eléctrica. Los materiales en
los cuales esta resistencia es pequeña, se llaman conductores y aquellos en que
esta resistencia es alta se llaman aislantes. Al elemento que presenta esta
resistencia al flujo de carga eléctrica se le llamará simplemente resistor. Un resistor puro o ideal
presenta una resistencia lineal, con la ecuación elemental

La energía entregada al
resistor es disipada y está dada por

Transformador
eléctrico ideal
En un transformador
ideal la potencia entregada al arrollado primario es la misma que la que este
entrega en el arrollado secundario, no hay pérdidas internas, entonces:

La cual se puede escribir
como

Donde a será
la razón de transformación.
En los sistemas
eléctricos la corriente por los elementos es la prevariable y la diferencia
de potencial a través de ellos la transvariable.
Los nombres de los
elementos generalizados asociados con los elementos eléctricos son los mismos.
Un capacitor eléctrico almacena energía en forma de campo eléctrico debido a la
transvariable (diferencia de potencial), un inductor eléctrico almacena energía
en forma de campo magnético en virtud de la pervariable (corriente) y un
resistor eléctrico disipa energía. Un transformador eléctrico estará
representado por un transformador generalizado con una relación de
transformación a igual al cociente de las diferencia de potencial de
entrada y de salida.
Un sistema de control
de lazo cerrado es aquél donde la señal de salida tiene efecto sobre la acción
de control. La figura 1.2 dá un panorama general de un sistema de lazo cerrado
donde se puede apreciar que la salida es medida y retroalimentada para
establecer la diferencia entre en valor deseado y el valor obtenido a la
salida, y en base a esta diferencia, adoptar acciones de control adecuadas.

En las figuras de la
1.3 y 1.5 se dan dos ejemplos para sistemas de control de lazo cerrado. En cada
una de estas figuras se puede apreciar que la parte fundamental para el control
de la planta en cuestión es la red de retroalimentación que censa el estado de
la salida. En estos ejemplos se ha pretendido establecer que la naturaleza de
las señales en un lazo de control no necesariamente en la misma, esto es,
pueden estar involucradas diferentes tipos de señales por ejemplo, mecánicas,
eléctricas, térmicas, hidráulicas, etc., dentro del mismo lazo.



2.2
SISTEMAS ANÁLOGOS
Se denominan sistemas
análogos aquellos que tienen igual modelo matemático pero son diferentes
físicamente. Las ventajas que tiene este proceder son dos básicamente:
1.
La
solución de la ecuación que describe un sistema físico puede ser resuelta por
un sistema análogo de otro campo. Por ejemplo, si se traslada un sistema
mecánico a un símil eléctrico equivalente, se podrá aplicar todas las
herramientas de la teoría de los circuitos eléctricos.
2.
Facilidad
en el trabajo experimental. Resulta más económico montar un circuito eléctrico
que un montaje mecánico y las medidas son más asequible y hasta más fiables.
Existen varias
analogías entre los movimientos de traslación y los circuitos eléctricos. Se ha
elegido una de ellas, la que resulta más sencilla:

Ejemplo 4.2
El esquema de la
figura muestra el comportamiento dinámico de una prensa hidráulica. Al dar presión
al fluido, P, transmite una fuerza sobre el pistón que al desplazarse
comprimirá al cuerpo. Este efecto se modela por un muelle, cuya constante es kp.
Además, se considera despreciable la masa del cuerpo a comprimir respecto al de
la prensa. No así la masa del pistón, al que se le asigna por la letra M. La dinámica del
tablero, donde se apoya el cuerpo, es modelada por cuatro amortiguadores de
constante k. Se pide:
a) Ecuaciones físicas
de los sistemas
b) Linealizar el
sistema cuando la presión del fluido sea nula, P=0.
c) Diagrama a bloques
d) FDT entre la
causa, variación de la presión, y el efecto, grado de compresión del cuerpo

a)
La
fuerza dada por el fluido se suma a la de la propia gravedad de la masa del
pistón. Ambas desplazarán el pistón hacia abajo, dando lugar a un rozamiento
entre las paredes del émbolo y el pistón. Estas fuerzas comprimirán al cuerpo y
el tablero se opondrá a deformarse.
Para obtener el conjunto de ecuaciones
algebro-diferenciales de la prensa se emplea las analogías entre los sistemas
mecánicos de traslación y los sistemas eléctricos, de cuya representación se
conseguirá las ecuaciones del sistema:


El nivel de
compresión del cuerpo es una variable dependiente entre el desplazamiento del
pistón y del tablero, al que se le designará por z.

b) Se hace notar que
la fuerza de la gravedad del cilindro produce un término constante que hace
necesario la linealización de las ecuaciones diferenciales, para luego obtener
la FDT. En el punto de equilibrio, esto es, sin presión, marcará las
condiciones de reposo:

La dinámica del
sistema es una función que depende de la presión, P, de la primera y segunda
derivada del desplazamiento del cilindro respecto al tiempo, x, y dela
compresión del cuerpo, z. Procediendo a linealizar a :

c) El diagrama a
bloques entre la compresión del cuerpo (efecto) y su causa
(Presión en el fluido),
estará definida por las siguientes FDT:

d) Sólo faltará
aplicar la expresión de estructuras de realimentación negativa y el
encadenamiento en cascada, para obtener la FDT solicitada:

En la analogía del
sistema mecánico al circuito eléctrico, las fuerzas se convierten en fuentes de
corriente y los desplazamientos mecánicos suponen los nodos de potencial.
2.2.1
ANALOGÍA FUERZA VOLTAJE
Considerando los sistemas
mostrados en la figura 2.1 podemos determinar siguiente conjunto de ecuaciones
diferenciales.


Si expresamos la ecuación
(1.35) en términos de la carga obtenemos:

Si comparamos (2.2) y (2.3)
observamos que son sistemas análogos, esto es, tienen una ecuación diferencial
idéntica, y podemos establecer las relaciones resumidas en la tabla siguiente:
Analogía fuerza voltaje.
Otra analogía entre los
sistemas mecánicos y eléctricos es conocida como analogía masa inductancia, y las relaciones se pueden observar en
la tabla.
|
Sistema
eléctrico
|
Sistema mecánico
|
|
|
Traslacional
|
Rotacional
|
|
|
Voltaje (
V )
|
Fuerza ( f )
|
Par ( T )
|
|
Corriente
( i )
|
Velocidad ( v )
|
Velocidad angular ( w )
|
|
Carga ( q )
|
Desplazamiento ( x )
|
Desplazamiento
angular ( q )
|
|
Inductancia ( L )
|
Masa ( m )
|
Momento de inercia ( J )
|
|
Resistencia
( R )
|
Coeficiente de fricción viscosa traslacional ( B )
|
Coeficiente de fricción viscosa rotacional ( B )
|
|
Recíproco
de la capacitancia (Elastancia S)
|
Constante del resorte traslacional( k )
|
Constante del resorte rotacional (k)
|
2.2.2
ANALOGÍA FUERZA CORRIENTE.
De manera similar podemos
considerar los sistemas mostrados establecer la relación existente entre las
ecuaciones de fuerza de un sistema mecánico y un sistema eléctrico. Las
ecuaciones que describen el sistema para el circuito eléctrico son:

Que expresa da en términos
del flujo magnético nos da:

Dado que el sistema mecánico
ha sido considerado el mismo que para la analogía fuerza voltaje podemos comparar
(1.36) y (1.38) para obtener obtenemos las relaciones dadas en la siguiente
tabla que son denominadas analogías fuerza-corriente.
Analogía
fuerza corriente.
La analogía fuerza corriente
a veces es también llamada analogía
masa capacitancia con las relaciones indicadas en la tabla.
|
Sistema
eléctrico
|
Sistema mecánico
|
|
|
Traslacional
|
Rotacional
|
|
|
Corriente
( i )
|
Fuerza ( f )
|
Par ( T )
|
|
Voltaje (
V )
|
Velocidad ( v )
|
Velocidad angular ( w )
|
|
Acoplamiento por flujo magnético (j )
|
Desplazamiento ( x )
|
Desplazamiento
angular ( q )
|
|
Capacitancia ( C )
|
Masa ( m )
|
Momento de inercia ( J )
|
|
Reciproco
de la resistencia (Conductancia)
|
Coeficiente de fricción viscosa traslacional ( B )
|
Coeficiente de fricción viscosa rotacional ( B )
|
|
Reciproco
de la inductancia (Invertancia)
|
Constante del resorte traslacional (k)
|
Constante del resorte rotacional (k)
|
2.3
ÁLGEBRA DE BLOQUES
Álgebra
de bloques
Los diagramas de bloques de
sistemas de control complicados se pueden simplificar usando una serie de
teoremas de transformación, las cuales se obtienen fácilmente por deducción del
significado de los elementos.


1.3.1 REDUCCIÓN DE DIAGRAMAS DE BLOQUES
El
objetivo es la reducción de un diagrama de bloques complejo a uno más sencillo.
Ejemplo
1:

Para reducir el diagrama se
pueden seguir los siguientes pasos:
1.- Numerar todos los puntos
de suma y ramificación:

2.- Reducir desde lo más
interno, por ejemplo entre 2 y 3, y entre 4 y 5:

3.- Llevar el diagrama a la
forma canónica de un sistema de control retroalimentado:

4.- Simplificar finalmente
el diagrama al de un sistema de lazo abierto.

Bro una referencia. En formato apa cuál seria
ResponderEliminar